



哈佛Pierre E Dupont上海交大杨广中《Science Robotics》综述:医疗机器人的十年回顾
文章来源:应用案例
2023-12-10
在过去的十年里,医疗机器人领域发展迅猛,成千上万的机器人手术系统现在被安装在世界各地的诊所里,数以百万计的手术已完成。随着医疗保健系统对手术机器人的接受程度慢慢的升高,研究人员越来越关注下一代医疗机器人可能会是啥样子。他们关注的不仅仅是外科手术机器人,其他医学领域也在研究中,包括进行身体康复的机器人、用于患者与非现场医疗工作者互动的远程呈现机器人、药房自动化机器人、诊所消毒机器人等等。

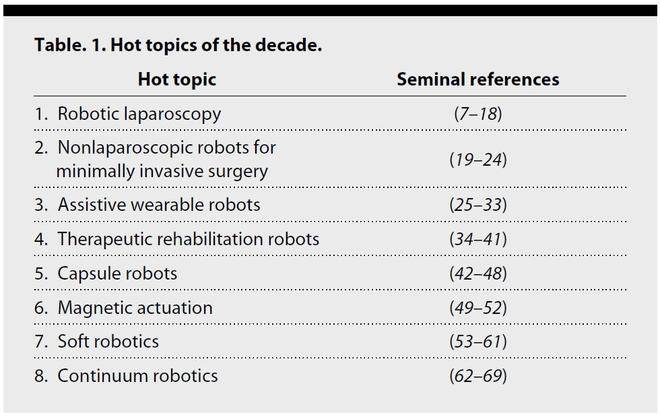
作者首先通过在Web of Science上搜索2010-2020年发表的关于医疗机器人的高被引论文,确定了8个热门线)。这些热门话题可以与特定的临床应用相关(例如,主题1,机腹腔镜检查机器人),也可以与在医学上有广泛应用的技术相关(例如,主题7,软体机器人)。
腹腔镜机器人技术可能是医疗机器人技术中最成熟,也肯定是商业上最成功的一个分支。在过去的十年里,在三个方面取得了进展:临床、商业和学术。大部分腹腔镜机器人的研究已确定进入临床。许多研究旨在比较机器人与标准(通常是手动腹腔镜)技术在不同手术过程中的疗效。例如前列腺根治术、膀胱癌根治术、直肠癌根治术、子宫切除术。
十年来,学术研究在两个方面取得了进展。第一种是使用腹腔镜机器人作为平台,开发增强的能力。这方面的主要子课题包括用于研究的开放平台机器人的引入,外科自动化发展的初步探索,以及在腹腔镜工具中集成力量传感的持续耕耘。腹腔镜手术的第二个研究方向是考虑新的机器人架构,能够大大减少手术的侵入性。单端口系统受到了最多的关注,包括最近由Intuitive公司推出的商业系统da Vinci SP。也有一些关于机器人的研究,它们被植入人体,然后通过系绳或外部磁场来机械地分离。
辅助可穿戴机器人专注于可穿戴机器人设备的设计和控制,旨在改善肌肉骨骼或神经肌肉受损个体的移动或功能。该领域的贡献领域包括为上、下肢截肢患者开发机器人四肢(也称为动力假肢),为神经肌肉损伤患者开发外骨骼(也称为动力矫形器),如脊髓损伤、中风、多发性硬化症患者。尽管这一领域的历史渊源至少可以追溯到20世纪60年代初,但在2010年至2020年这十年里,能够正常的看到它的完全态发展。
辅助性外骨骼和义肢是用来替代失去的功能的,康复机器人是用来为神经损伤(最常见的是中风和脊髓损伤)后的肢体提供重复的运动治疗,从而恢复个人的能力。这些机器人设备能够以一种诱导或促进神经可塑性的方式执行伸手、抓握、行走和脚踝运动,这可以增大运动范围和运动协调的恢复。
在2010年到2020年的十年间,康复机器人的研究大多分布在在四个领域。首先是新颖的设备设计,慢慢的变多地采用外骨骼形式,着重关注上肢远端关节,并在驱动和结构方面结合了柔顺性和软材料。第二个是开发新的控制算法,以调节人与机器人之间的互动,从而激发人类的最大参与。第三是创造意图检测的新方法来推断和支持病人想要的运动,而不是规定或预先编程的轨迹。第四是扩大了对神经恢复进行客观和定量评估的机器人设备的使用,而不单单是提供治疗。
在千禧年之初,Given Imaging公司(现在的Medtronic公司)推出了无线胶囊内窥镜作为一种微创检查胃肠道的方法。吞咽一片药片就可以在肠道深处收集图像,这一技术革新了胃肠内窥镜检查技术,并引发了一个全新的研究领域:医疗胶囊机器人。
后来研究人员开发了磁驱动的方法。磁力耦合器的使用绕过了对复杂机构的需要,并减少了机载功率需求,由此减少了设备的总体尺寸和复杂性。这种形式的驱动通过外部产生的磁场来操纵胶囊。医用胶囊机器人现在是临床上可行的标准介入内窥镜检查的替代品。
早在磁场被用来创造身体内部的图像之前,它们就被用来进行手术。20世纪50年代,人们开始研究在导尿管尖端安装磁铁来引导导尿管。然而,直到2003 年,Stereotaxis的Niobe 机器人磁导航系统才出现商用系统,该系统使用两个移动的永磁体产生一些变化的磁场,用于引导心内膜消融导管治疗心律失常(电生理程序)。尽管这种磁导导尿管系统的市场渗透率一直较低,但在过去的十年中,研究人员和医疗设施公司对该系统的兴趣持续不断的增加,该主题发表的论文数量呈线性增长,被引次数呈指数增长。
基于软概念、本质兼容的结构和智能材料的机器人技术从一开始就与仿生学和生物灵感紧密结合在一起。另一方面,对具有柔顺身体的仿生机器人的兴趣日益浓厚,促进了对智能材料的研究,这些材料可用来制造软机器人或为软机器人提供从宏观尺度到纳米尺度的传感和驱动能力。举个例子,大多数关于具有传感能力的人造皮肤的工作都可以在软机器人和软设备的应用中找到。
连续体机器人通过弯曲变形而不是通过离散关节来改变形状,与传统的机器人机构相比,这种机器人可以通过更小的手术通道进行手术。它们能通过自然孔进入人体,通过体内腔导航,在穿过实体组织时绕过关键结构。与传统设计相比,连续体机器人的弯曲顺应性也提高了其安全性。
在2010年至2020年的十年间,连续体机器人的研究大多分布在在四个领域:(i)在机器人建模和控制中整合外部接触和负载,(ii)开发控制机器人刚度的方法,(iii)创建软连续体机器人,(iv)设计用于特定临床应用的连续体机器人。
...推荐应用案例
-
2024-05-01
-
2024-05-01
医美板块龙头股一览表(四只优质医美龙头股)
-
2024-05-01
环球时讯:医疗美容上市公司龙头股有哪些2022
-
2024-05-01
【48812】亚华电子:上海青芒智能科技有限公司为公司参股子持股票份额为5%
-
2024-05-01
亚华电子董秘回复:长颈猫老人陪护机器人是上海青芒智能科技有限公司研发的产品上海青芒是亚华电子参股子公司
-
2024-05-01
【48812】“浦东企业发布”人工智能张江科学城专场炽热报名中
-
2024-05-01
【48812】亚华电子:长颈猫白叟陪护机器人是上海青芒智能科技有限公司研制的产品 上海青芒是亚华电子参股子公司
-
2024-04-28
高效清淤畅通河道——现代清淤机器人的应用与发展
-
2024-04-28
【48812】日本陪护机器人 帮助瘫痪者自立
-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 高德娱乐官方网站地址-高德APP娱乐下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:高德娱乐官方网站 高德娱乐APP下载 高德娱乐地址
鲁公网安备 鲁ICP备20019457号
合作网站:高德娱乐官方网站 高德娱乐APP下载 高德娱乐地址


