



金属勘探器机器人车辆
文章来源:新闻中心
2023-07-25
埋在地下的地雷对人的生命形成要挟。人工勘探和铲除这些地雷是一项风险的使命,有时可能会形成事端。在这种情况下,机器人协助勘探地雷。不仅是地雷,这些机器人还能够用来勘探地面上的任何其他金属。这篇文章解说了运用射频技能的
拟议的系统由发射器和接纳器电路组成。发射器电路传输操作机器人所需的指令。接纳电路经过射频接纳这些指令,并依据收到的指令移动机器人。一个金属勘探器与接纳器一侧的操控器衔接。因而,每逢检测到任何金属时,机器人就会停在那里,蜂鸣器开端响起。
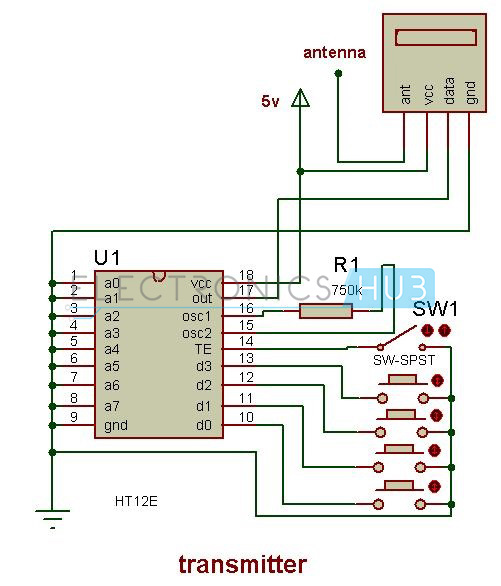
发射器部分由射频编码器、射频发射器和按钮组成。这儿运用的射频编码器IC是HT12E,它是一个18针的IC,4位二进制输入经过AD0、AD1、AD2、AD3引脚应用到解码器上。A0-A7是用于安全传输的地址引脚。这些引脚在发射器电路中被衔接到地。4位数据被平行地传送到射频发射器。串行地传送到射频接纳器。输入是经过按钮给编码器的。射频对的作业频率为434kHz。
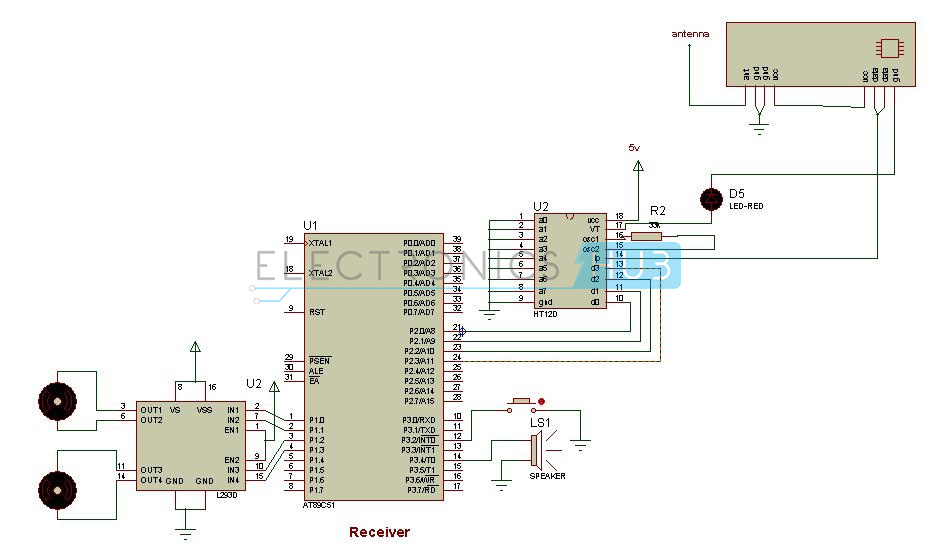
接纳器部分由AT89c51微操控器、射频解码器、射频接纳器、金属勘探器、蜂鸣器、L293d集成电路和机器人组成。
收到的数据被应用于射频解码器。这儿运用的射频解码器是HT12D。解码后的输入被衔接到微操控器的2号端口。四个数据引脚D0-D3衔接到端口P2.0-P2.3,解码后的数据被应用到操控机器人运动的微操控器。蜂鸣器衔接到端口3.4,当在其途径上检测到任何金属时,蜂鸣器就会响。
金属勘探器被衔接到微操控器的3.2脚。在这儿,金属勘探器的方位衔接了一个按钮。金属勘探器在电路中起首要效果。这儿面将有一个振荡器,它发生的交流电经过线圈发生一个交变磁场。当任何金属出现在线圈邻近时,会发生磁场,因而能够经过运用另一个线圈来检测磁场的改变。
L293d是一个电机驱动IC。该IC用于驱动电机。L293d内部有h桥。要了解更多关于这个IC的信息,请参阅L293d的数据表。
在机器人移动的过程中,假如在其途径上检测到任何金属,机器人就会停在那里,并宣布蜂鸣器。
假如接纳到的值等于1,那么将端口值设为0x01,使机器人向前进方向移动。
...-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 高德娱乐官方网站地址-高德APP娱乐下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:高德娱乐官方网站 高德娱乐APP下载 高德娱乐地址
鲁公网安备 鲁ICP备20019457号
合作网站:高德娱乐官方网站 高德娱乐APP下载 高德娱乐地址


